
Hôm nay Robot STEAM Việt Nam sẽ giới thiệu với các bạn các cảm biến hồng ngoại trên robot mBot và chương trình mô phỏng.
Cảm biến hồng ngoại trên robot mbot
1. Cấu tạo và nguyên lý hoạt động
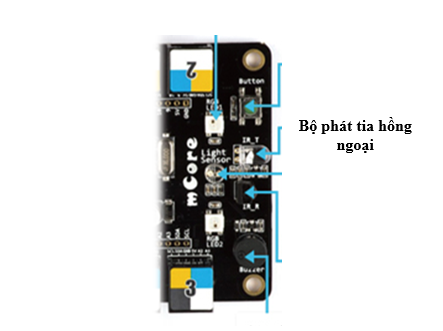
Bảng điều khiển mCore được trang bị bộ phát và thu tín hiệu tia hồng ngoại và mBlock có 2 các khối có thể được sử dụng để gửi và nhận tín hiệu.
Trên thân mBot, cảm biến hồng ngoại là bộ phận gồm 1 cặp cảm biến được lắp dưới đầu của mBot, trong đó cảm biến bên phải và bên trái cách nhau khoảng 2 cm.
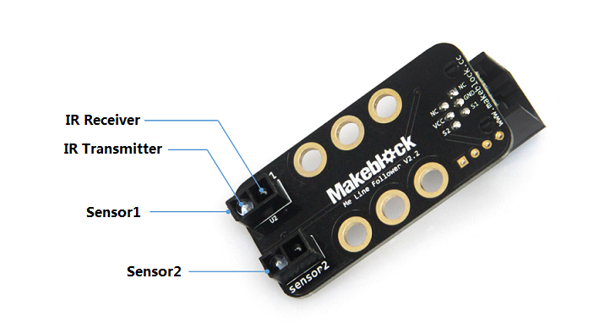
Module cảm biến hồng ngoại gắn trên mBot
Loại cảm biến này hoạt động dựa trên nguyên lý là sử dụng tia hồng ngoại phát ra để nhận biết màu, với những màu tối như màu đen do hấp thụ mạnh sáng sáng hồng ngoại nên ngay sau đó bộ phận cảm biến sẽ báo tín hiệu rất yếu hoặc gần như bằng 0 về với bảng điều khiển.
Trong khi đó đối với màu trắng, là loại màu gần như không hấp thụ tia sáng hồng ngoại, nên khi tia sáng loại này được chiếu đến, phản xạ mạnh ngược lại, báo về bảng điều khiển. Sau khi bảng điều khiển tiếp nhận thông tin là mBot đang gặp màu đen hay màu trắng sẽ đưa ra hướng xử lý những lệnh tiếp theo, dựa trên chương trình đưa vào cho mBot. Chú ý rằng, trên thực tế đối với các màu không phải là màu đen thì đều được coi là màu có phản xạ mạnh đối với tia sáng hồng ngoại hay nói cách khác mBot xác định các màu khác đen đều là màu trắng.
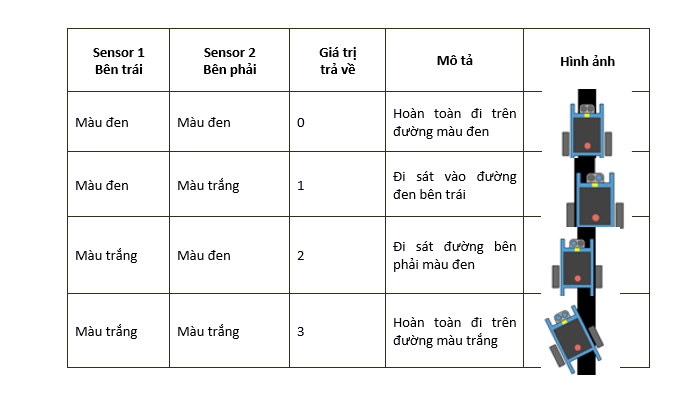
Bên cạnh đó, cảm biến hồng ngoại trong mBot còn áp dụng nguyên lý cảm biến tuần tra, chi tiết như ở bảng dưới đây:
2. Lập trình và ví dụ thực tế
Bạn đã bao giờ tự hỏi, khi ta đi đến những cửa hàng cửa tự động mở ra, đóng lại khi có người ra vào cửa chưa? Hoặc khi có người đi tới gần thì đèn tự bật lên sau vài giây và tắt đi khi người đó đi khỏi khu vực có lắp cảm biến hồng ngoại. Tuy với nguyên lý không quá phức tạp nhưng lợi ích thu được từ ứng dụng về cảm biến hồng ngoại lại rất hữu ích trong nhiều khía cạnh của cuộc sống.
Giao diện mBlock liên quan đến điều khiển cảm biến hồng ngoại trong
APP mBlock
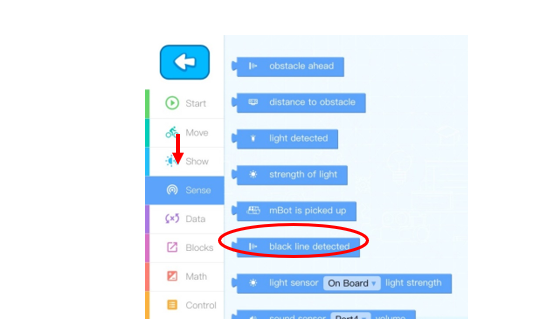
Phần cảm biến hồng ngoại của mBot được điều khiển thông qua chức năng Sense [cảm biến] của APP mBlock. Tiếp đến sử dụng cú pháp “black line detected” [xác định đường màu đen hay là khi mBot gặp đường màu đen] kết hợp với câu lệnh khác ví dụ như là về di chuyển (đi thẳng, rẽ phải, rẽ trái) để tạo ra một khối câu lệnh nào đó, sau khi căn cứ vào loại đường có màu sắc nào xác định bởi thông tin thu được từ bảng điều khiển, mBot sẽ thực hiện các mệnh lệnh di chuyển tương ứng.
Bài toán:
1) Hãy gắn các câu lệnh dùng cảm biến hồng ngoại sao cho mBot có thể di chuyển theo đường màu đen có hình dạng số 8. Ghi chú: Bản đồ đường đi màu đen hình số 8 được cung cấp sẵn.
2) Hãy gắn các câu lệnh dùng cảm biến hồng ngoại sao cho mBot chỉ di chuyển trong phạm vi đường màu đen và không vượt ra ngoài. Ghi chú: Bản đồ ô vuông viền màu đen bao quanh được cung cấp sẵn.
3) Viết chương trình thực hiện như phần 2 và thêm yêu cầu là mBot tìm được đường ra khi gặp đường màu trắng. Ghi chú: bản đồ ô vuông viền màu đen bao quanh, có 1 đường trắng nhỏ biểu chưng cho cửa ra được cung cấp sẵn.
3. Chương trình mô phỏng
Đây là một chương trình cho mBot có thể di chuyển trên đường màu đen có hình dạng số 8. Thực hiện nạp chương trình cho mBot thông qua cáp usb và khi nhấn nút trên mBot thì mBot sẽ tự chạy trên đường màu đen có hình số 8 có sẵn trong hộp.
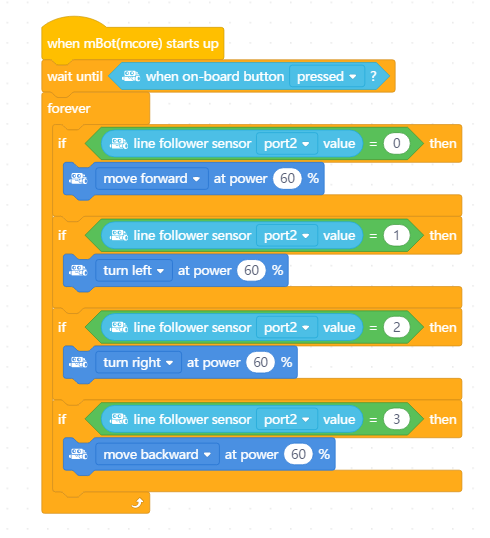
Chương trình cho mBot có thể chạy trên đường màu đen hình số 8
Lưu ý:
- Nên sử dụng kết nối qua cáp usb để nạp chương trình cho mBot: Các chương trình về cảm biến hồng ngoại hay cảm biến sóng siêu âm cần đòi hỏi mBot thực hiện thao tác xử lý ngay lập tức nếu cần thời gian truyền về PC hay điện thoại sẽ gây độ trễ lớn khiến mBot không thể thực hiện kịp thời các thao tác cần xử lý.
- Nếu dòng " when mBot(mCore) starts up" màu xám :
Có thể là một trong các nguyên nhân sau:
+ mBot chưa được kết nối với PC thông qua cáp usb.
+ Gạt lại switch nguồn trên mBot, và thực hiện "upload program".
Bạn có thể xem lại phần Câu hỏi thường gặp số 3" hướng dẫn upload chương trình lên mBot" ở phần câu hỏi thường gặp trong phần hỗ trợ kỹ thuật.









")


