

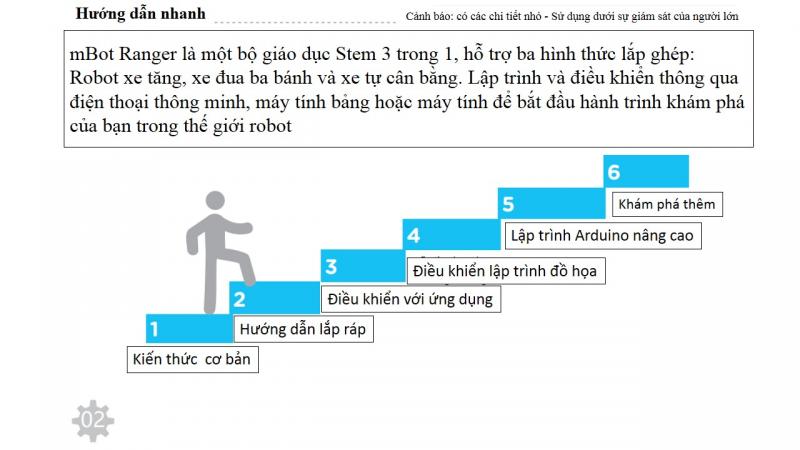
mBot Ranger là một bộ giáo dục Stem 3 trong 1, hỗ trợ ba hình thức lắp ghép: Robot xe tăng, xe đua ba bánh và xe tự cân bằng. Lập trình và điều khiển thông qua điện thoại thông minh, máy tính bảng hoặc máy tính để bắt đầu hành trình khám phá của bạn trong thế giới robot.
Các cảm biến trên robot mBot ranger
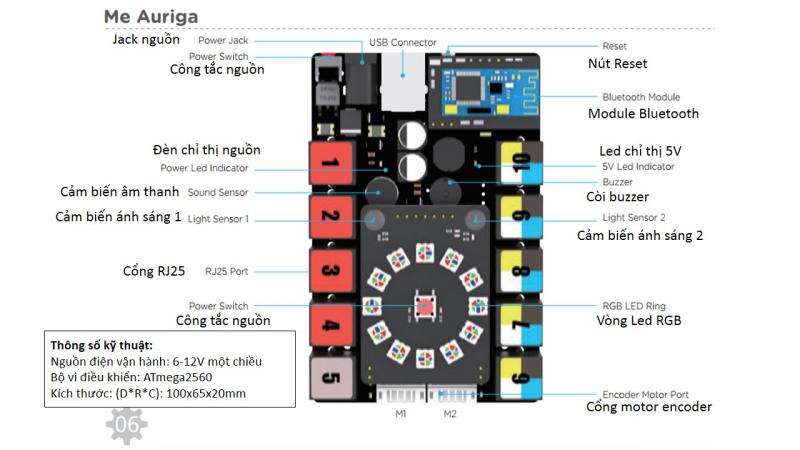
Các cảm biến được trang bị trên board Ranger
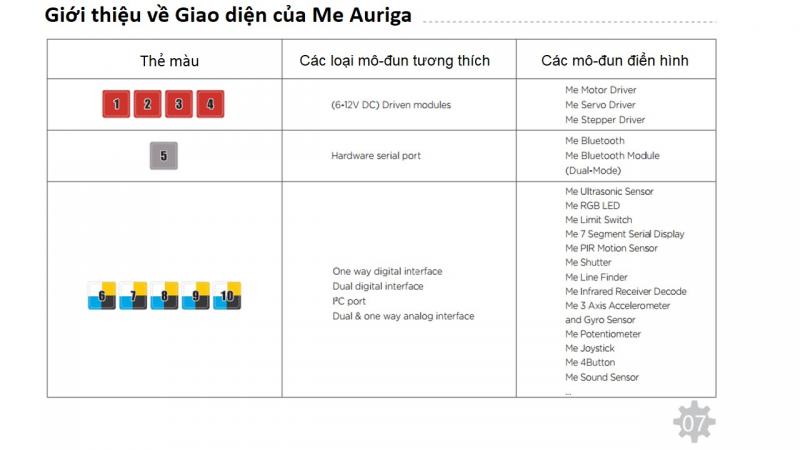
Giới thiệu về Giao diện của Me Auriga
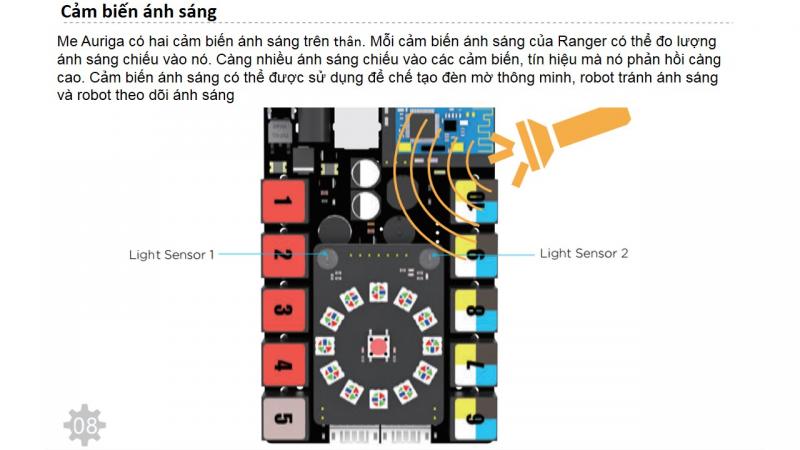
Cảm biến ánh sáng
Me Auriga có hai cảm biến ánh sáng trên thân. Mỗi cảm biến ánh sáng của Ranger có thể đo lượng ánh sáng chiếu vào nó. Càng nhiều ánh sáng chiếu vào các cảm biến, tín hiệu mà nó phản hồi càng cao. Cảm biến ánh sáng có thể được sử dụng để chế tạo đèn mờ thông minh, robot tránh ánh sáng và robot theo dõi ánh sáng
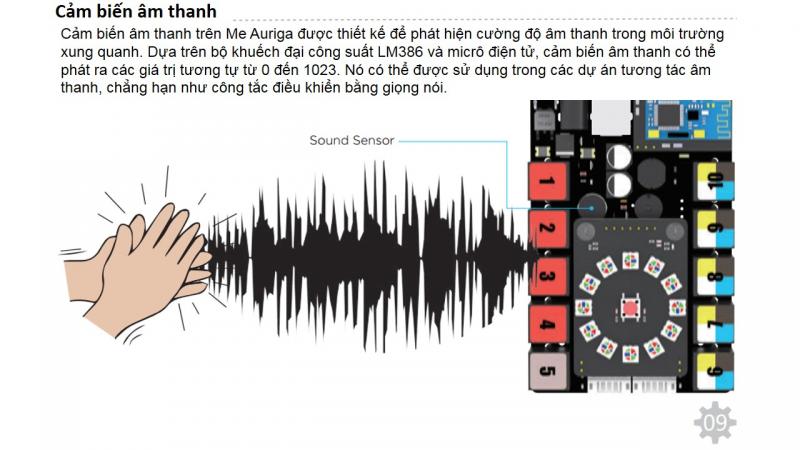
Cảm biến âm thanh
Cảm biến âm thanh trên Me Auriga được thiết kế để phát hiện cường độ âm thanh trong môi trường xung quanh. Dựa trên bộ khuếch đại công suất LM386 và micrô điện tử, cảm biến âm thanh có thể phát ra các giá trị tương tự từ 0 đến 1023. Nó có thể được sử dụng trong các dự án tương tác âm thanh, chẳng hạn như công tắc điều khiển bằng tiếng động.
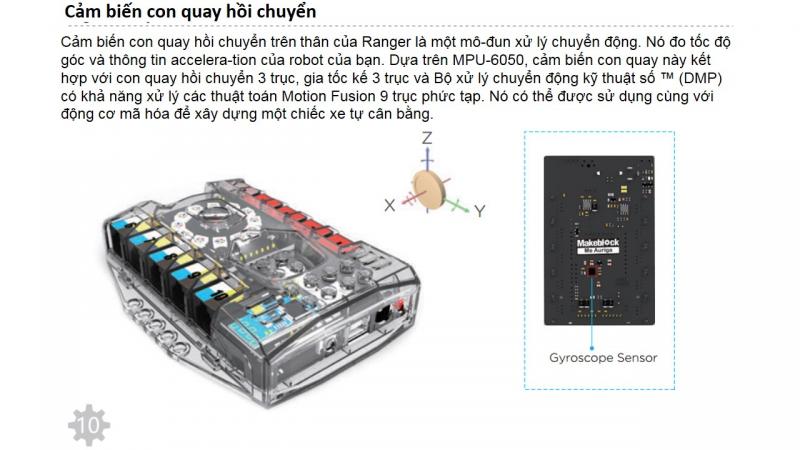
Cảm biến con quay hồi chuyển
Cảm biến con quay hồi chuyển trên thân của Ranger là một mô-đun xử lý chuyển động. Nó đo tốc độ góc và thông tin accelera-tion của robot của bạn. Dựa trên MPU-6050, cảm biến con quay này kết hợp với con quay hồi chuyển 3 trục, gia tốc kế 3 trục và Bộ xử lý chuyển động kỹ thuật số ™ (DMP) có khả năng xử lý các thuật toán Motion Fusion 9 trục phức tạp. Nó có thể được sử dụng cùng với động cơ mã hóa để xây dựng một chiếc xe tự cân bằng.
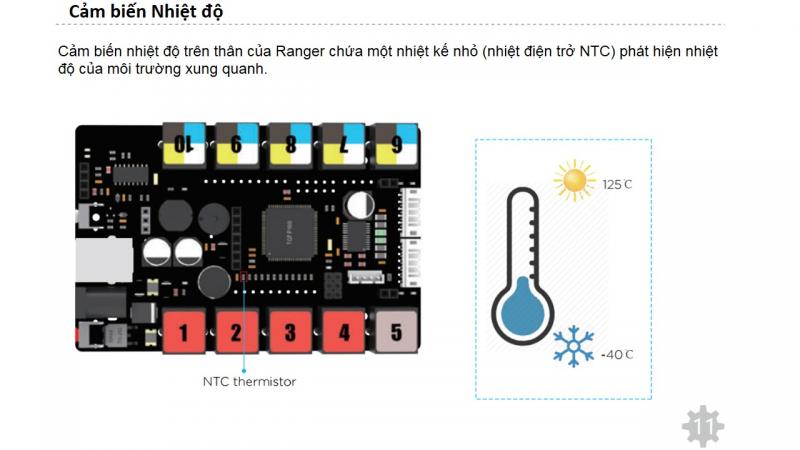
Cảm biến nhiệt độ
Cảm biến nhiệt độ trên thân của Ranger chứa một nhiệt kế nhỏ (nhiệt điện trở NTC) phát hiện nhiệt độ của môi trường xung quanh.
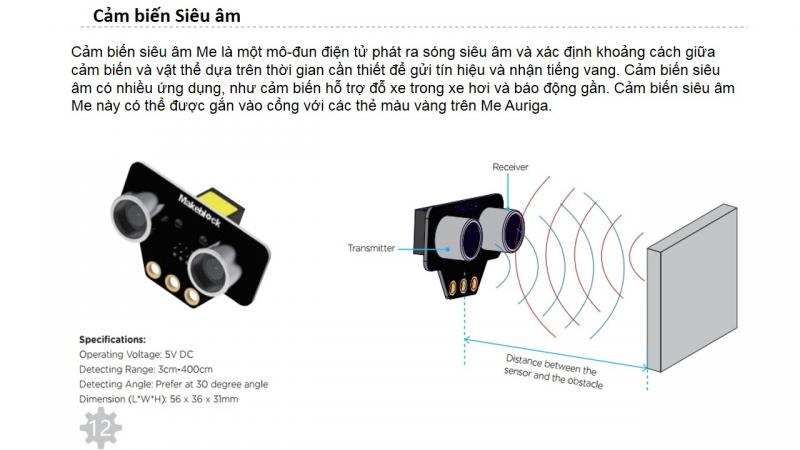
Cảm biến Siêu âm
Cảm biến siêu âm Me là một mô-đun điện tử phát ra sóng siêu âm và xác định khoảng cách giữa cảm biến và vật thể dựa trên thời gian cần thiết để gửi tín hiệu và nhận tiếng vang. Cảm biến siêu âm có nhiều ứng dụng, như cảm biến hỗ trợ đỗ xe trong xe hơi và báo động gần. Cảm biến siêu âm Me này có thể được gắn vào cổng với các thẻ màu vàng trên Me Auriga.
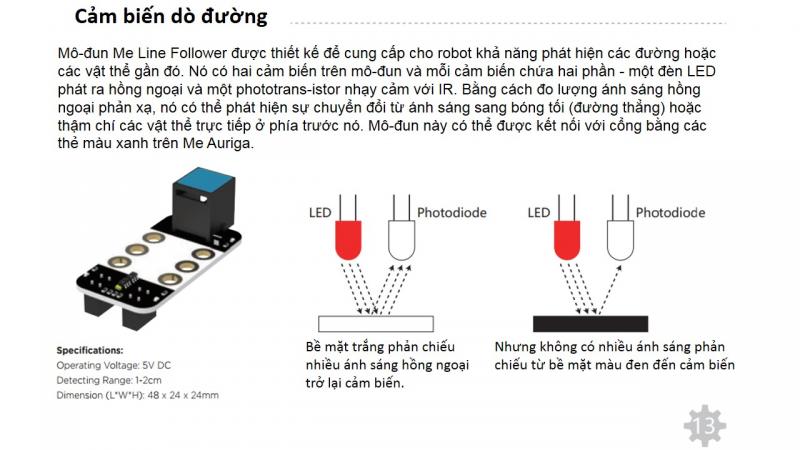
Cảm biến dò đường
Mô-đun Me Line Follower được thiết kế để cung cấp cho robot khả năng phát hiện các đường hoặc các vật thể gần đó. Nó có hai cảm biến trên mô-đun và mỗi cảm biến chứa hai phần - một đèn LED phát ra hồng ngoại và một phototrans-istor nhạy cảm với IR. Bằng cách đo lượng ánh sáng hồng ngoại phản xạ, nó có thể phát hiện sự chuyển đổi từ ánh sáng sang bóng tối (đường thẳng) hoặc thậm chí các vật thể trực tiếp ở phía trước nó. Mô-đun này có thể được kết nối với cổng bằng các thẻ màu xanh trên Me Auriga.









")


