
Giới thiệu về cảm biến sóng siêu âm trên robot giáo dục mBot. Cách thức hoạt động của cảm biến sóng siêu âm và chương trình mô phỏng.
1. Cấu tạo và nguyên lý hoạt động cảm biến sóng siêu âm trên robot mBot
Cảm biến siêu âm hoạt động dựa trên nguyên tắc là mắt trái (T) sẽ phát 1 đoạn sóng siêu âm tần số trên 42kHz và mắt phải (R) sẽ thu nhận tần số sóng siêu âm trở lại. Dựa vào thời gian sóng phát ra và quay lại để đo khoảng cách, xác định chướng ngại vật phía trước. Tiếp đến, sau khi xác định được phía trước có chướng ngại vật hay không có thể đặt tiếp các chuỗi lệnh phù hợp cho mBot thực hiện. Trên thân mBot, bộ phẩn cảm biến siêu âm có hình dạng như dưới đây:

Module cảm biến sóng siêu âm trong mBot
Cảm biến siêu âm thường được ứng dụng phổ biến trong giao thông vận tải để phòng trách va chạm xảy ra, hoặc ngay trong sinh hoạt gia đình cũng được ứng dụng rộng rãi với máy hút bụi tự động, …
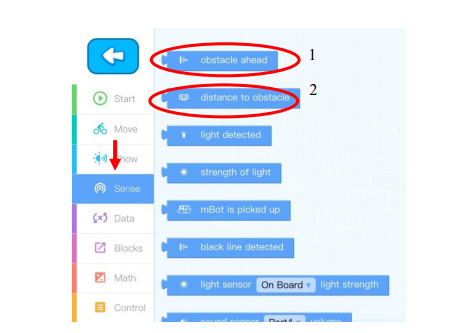
Giao diện mBlock liên quan đến điều khiển cảm biến sóng siêu âm trong APP mBlock
Cảm biến siêu âm của mBot được điều khiển thông qua chức năng sense [cảm biến] của APP mBlock, tiếp đến có hai lựa chọn thực hiện tương ứng với 2 đường khoanh tròn dưới đây.
[1] là cú pháp mặc định nếu cứ gặp chướng ngại vật ở phía trước, bảng điều khiển thu được tín hiệu sau đó sẽ xác nhận và thực hiện các lệnh tiếp theo.
[2] là cú pháp xác định chướng ngại vật phía trước cách bao xa, đối với cú pháp này, nhất thiết phải kết hợp với một số phép toán để mBot xác định nếu vị trí hiện tại đang cách chướng ngại vật lớn hơn hay nhỏ hơn một khoảng cách xác định nào đó, khi thỏa mãn điều này thì sẽ thực hiện các lệnh tương ứng tiếp theo.
Bài toán:
1) Viết ghép chương trình chạy mBot thỏa mãn điều kiện là cứ gặp chướng ngại vật phía trước, mBot sẽ lùi lại và quay phải hoặc quay trái, nếu không thì mBot sẽ đi thẳng.
2) Viết ghép chương trình để mBot dừng lại khi cách chướng ngại vật phía trước một khoảng cách cụ thể nào đó.
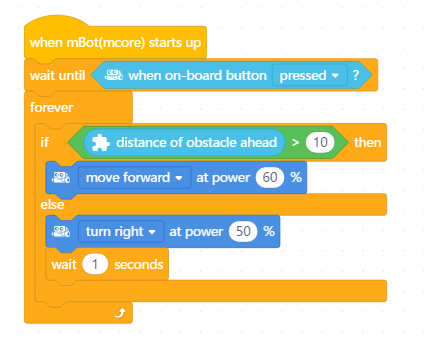
2. Chương trình mô phỏng
Một ví dụ mô phỏng cách thức mBot sử dụng cảm biến sóng siêu âm để tránh vật cản. Cần sử dụng cáp usb và "upload program" lên mBot. Chương trình sẽ tự hoạt động khi nhấn nút trên mBot.
Lưu ý:
- Nên sử dụng kết nối qua cáp usb để nạp chương trình cho mBot: Các chương trình về cảm biến hồng ngoại hay cảm biến sóng siêu âm cần đòi hỏi mBot thực hiện thao tác xử lý ngay lập tức nếu cần thời gian truyền về PC hay điện thoại sẽ gây độ trễ lớn khiến mBot không thể thực hiện kịp thời các thao tác cần xử lý.
- Nếu dòng " when mBot(mCore) starts up" màu xám :
Có thể là một trong các nguyên nhân sau:
+ mBot chưa được kết nối với PC thông qua cáp usb.
+ Gạt lại switch nguồn trên mBot, và thực hiện "upload program".
Bạn có thể xem lại phần Câu hỏi thường gặp số 3" hướng dẫn upload chương trình lên mBot" ở phần câu hỏi thường gặp trong muc hỗ trợ kỹ thuật.









")


