
Tổng hợp các câu hỏi thường gặp về mBot
Tổng hợp các câu hỏi thường gặp:
6, Vấn đề liên quan đến upload và cổng port
Câu số 32: Tại sao lỗi khi upload program tới Makeblock robot theo cách không dây sử dụng 2.4G hoặc bluetooth
Câu số 33: Tại sao usb cáp đã kết nối từ mạch mBot với PC mà cổng port không được xác định trên mBot
Câu số 34: Tôi không thể tìm thấy cổng kết nối cho robot trên mBlock và có nhiều BT port không được xác định
Câu số 35: Những cách xử lý sự cố khi khi upload program thất bại tới mBot bằng mBlock
Câu số 36: Chương trình mới update lên mBot không hoạt động
Câu số 37: Chương trình mới chạy trên mBot kết nối với usb cáp không hoạt động khi tháo usb cáp
7, điều chỉnh tốc độ
Câu số 38: Làm thế nào để thay đổi tốc độ mBot
8, Liên quan đến nguồn + pin
Câu số 39: Làm thế nào để sạc sau khi kết nối với pin lithium
Câu số 40: Nguồn hoạt động của mạch bao Vôn
Câu số 41: Khi mà pin lithium trên mBot đang sạc, có cái gì bảo vệ
Câu số 42: Kích cỡ của pin
Câu số 43: Có gì khuyến cáo về pin li-po sử dụng cho mBot
9, program example
Câu số 44: Chương trình test cảm biến hồng ngoại và cảm biến dò đường
Câu số 45: Chương trình test cho 1m LED( 30 light) hoạt động trên mBot
Nếu có vấn đề gì cần tư vấn bạn có thể gọi theo số điện thoại 0923231212 hoặc 0934519822
Hoặc gửi mail về hòm thư: hotro@robotsteam.vn
VI, Vấn đề liên quan đến upload và cổng port
32.Tại sao lỗi khi upload program tới makeblock robot theo cách sử dụng 2.4G hoặc bluetooth
Xin lưu ý rằng chương trình không dây có kết nối 2.4G / Bluetooth chỉ có thể thực hiện sửa lỗi online. Vì vậy, bạn phải ngắt kết nối 2.4G / Bluetooth, sau đó kết nối với cáp USB nếu bạn muốn tải các chương trình lên mBot để hoạt động độc lập.
Các kết nối không dây 2.4G / Bluetooth cho phép bạn sử dụng mBot để gửi lệnh qua máy tính qua Bluetooth hoặc WiFi, nhưng bạn phải kết nối mBot qua cáp USB nếu bạn muốn tải lên các chương trình để chạy không cần giám sát mBot. Lý do là các module Bluetooth và WiFi không thể sử dụng trình lập trình trên bo mạch được yêu cầu phải tải chương trình vào bộ nhớ của mBot. Khi một chương trình được "uploaded" qua cáp USB, nó sẽ ghi đè lên bất cứ thứ gì khác trong bộ nhớ và thay thế nó bằng chương trình mới.
33.Tại sao usb cáp đã kết nối từ mạch mBot với PC mà cổng port không được xác định trên mBot
Một số lý do có thể gây nên vấn đề:
Máy tính của bạn chưa cài đặt driver của main board.
Đối với PC Windows, vui lòng kiểm tra xem có cổng COM tương ứng USB_SERIAL CH340 bên dưới Device Manager->Ports.
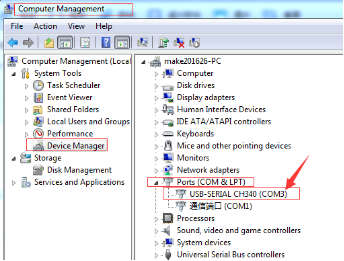
Với Mac PC, vui lòng kiểu tra cổng tương tự sau /dev/tty.wchusbserial1410.
Nếu không có cổng nối tiếp như vật, vui lòng tải và cài đặt arduino driver.Tải link cho Windows
nếu máy tính bạn là Mac, vui lòng tải chính xác driver:
Nếu hệ điều hành mac os của bạn phiên bản thấp hơn Mac os seirra, đây là link để tải driver link .
Nếu nó là Mac os sierra, xin vui lòng tải liên kết này this driver.
Nếu hệ điều hành Mac os cao hơn sierra, đây là link để tải driverlink .
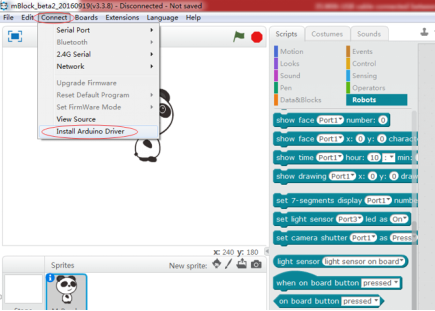
Hoặc bạn có thể cài đặt driver Arduino thông qua phần mềm mBlock một cách chính xác. Như ảnh dưới đây:
Công tắc nguồn switch của main board (mCore) chưa được gạt ON (vấn đề này chỉ có với mBot/mCore).
Kết nối Bluetooth từ robot có thể chiếm lấy các cổng port. Loại bỏ thiết bị Bluetooth từ robot trong khi sủ dụng cáp usb.
Các thiết bị Bluetooth được ghép nối trên PC có thể gây nhiễu cổng với kết nối USB. Xem phần câu hỏi thường gặp
Cáp usb có thể bị hỏng. Vui lòng thử thay đổi cáp USB (hoặc bạn có thể thử sử dụng PC khác để kiểm tra).
34.Tôi không thể tìm thấy cổng kết nối cho robot trên mBlock và có nhiều BT port không được xác định
Có một số trường hợp không thể tìm thấy cổng port nối tiếp cho robot trên mBlock với usb cáp được kết nối.
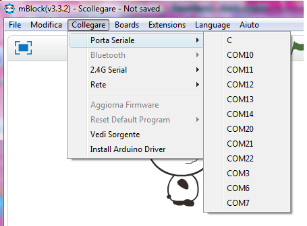
Giao diện: khi lựa chọn: "serial port" kết nối trên phần mềm mBlock, sẽ xuất hiện một vài tùy chọn bắt đầu từ COM10 ... COM11... COM22... COM3...COM7. Trong khi không cái nào là cho usb kết nối. Hiển thị như dưới đây:
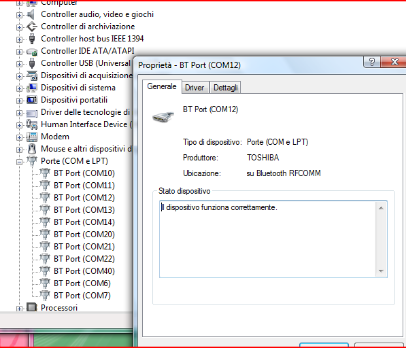
Khi bạn kiểu tra ở dưới Device Manager->Ports, có một vài cổng BT tương ứng với các cổng COM. Hiển thị như dưới đây:
35.Những cách xử lý sự cố khi khi upload program thất bại tới mBot bằng mBlock
Đảm bảo bạn tải lên chương trình theo các bước chính xác (đảm bảo kết nối với cáp USB, chọn chính xác cổng nối tiếp và board). Vui lòng tham khảo các bước trong Câu hỏi thường gặp 3.Cách để upload chương trình của tôi vào mBot.
Đã thử lưu ý thứ nhất nhưng vẫn gặp lỗi đó, vui lòng loại bỏ kết nối module Bluetooth/2.4G khỏi bảng mạch mCore, sau đó upload lại chương trình và kiểm tra lại.
Nếu hiển thị upload finish trong khi upgrade firmware nhưng vẫn failed khi upload the program, vui lòng kiểm tra lại liệu có bất kỳ phần mềm arduino nào khác được cài đặt trong hệ thống không. Vui lòng đóng lại nếu có
Nếu cả hai Upgrade firmware và upload program failed, thử thay đổi cáp USB, USB port hoặc thay đổi PC để kiểm tra.
36.Chương trình mới update lên mBot không hoạt động
Vui lòng reset default program dựa theo các bước trong câu hỏi thường gặp 2.Cách để reset default program thủ công và thử kiểm tra.
Nếu hiển thị upload finish nhưng default program không hoạt động và vẫn còn các chức năng của chương trình cũ, và sau đó bảng mạch có thể mất chương trình khởi động của nó(bootloader) .
37.Chương trình mới chạy trên mBot kết nối với usb cáp không hoạt động khi tháo usb cáp
Vui lòng kiểm tra những điều dưới dây cho vấn đề này:
1.Chương trình có thể không được tải lên robot đúng cách . Vui lòng tải lại chương trình làn nữa dựa theo câu hỏi thường gặp 3.Cách để upload chương trình của tôi vào mBot.
Lưu ý: Nó đề nghị cần tháo kết nối module bluetooth/2.4G từ mBot trong khi tải chương trình cho mBot.
2.Nếu bạn có thể thấy dòng chữ upload finish, nhưng robot vẫn không hoạt động khi tháo cáp usb, có thể mBot không nhận đủ năng lượng từ pin. Vui lòng thay pin cho mBot.
Nếu có vấn đề tương tự. Xin thử thay đổi pin cho robot.
Có thể sử dụng pin litium sạc lại được hoặc cũng có thể sử dụng pin sử dụng 1 lần như pin con thỏ.
VII, điều chỉnh tốc độ
38.Làm thế nào để thay đổi tốc độ mBot
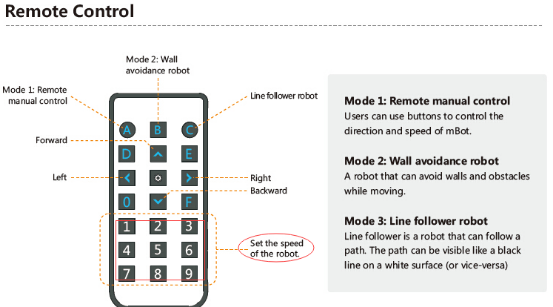
Nếu bạn điều khiển mBot thông qua bộ điều khiển từ xa IR bằng chương trình mặc định của nhà sản xuất, các phím 1-9 trên bộ điều khiển từ xa IR được thiết lập để điều chỉnh tốc độ mBot. 1 cho chậm nhất và 9 cho nhanh nhất.
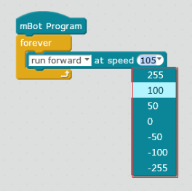
Nếu bạn muốn viết chương trình của mình cho mBot với phần mềm mBlock, bạn có thể sửa đổi tốc độ trong khối chương trình sau.
VIII, Liên quan đến nguồn + pin
39.Làm thế nào để sạc main board sau khi kết nối với pin lithium
Sử dụng cáp usb để kết nối main board tới máy tính của bạn, quá trình sạc sẽ tự động thực hiện( không có vấn đề switch gạt bật hay không). Nếu bạn gạt switch OFF, pin có thể được sạc với tốc độ nhanh hơn và hiệu quả hơn.
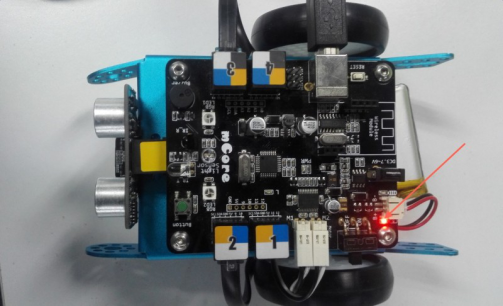
Để xem trạng thái:
Nếu đèn báo màu đỏ ở bên tay trái main board được bật, nó thể hiện quá trình sạc đang diễn ra.
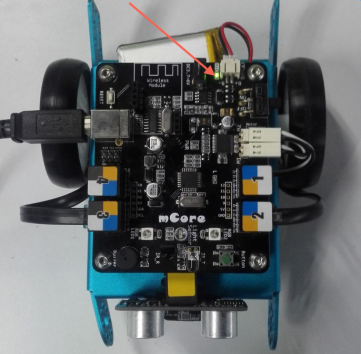
Nếu đèn báo xanh ở phía bên phải được bật, điều đó có nghĩa là pin đã được sạc đầy.
40.Điện áp hoạt động của mạch
A: 3.7V tới 6V
41.Khi mà pin lithium trên mBot đang được sạc, có bất kỳ sự bảo vệ an toàn nào
A:Có. Nó có bảo vệ khi quá dòng sạc và bảo vệ khi sạc quá đầy.
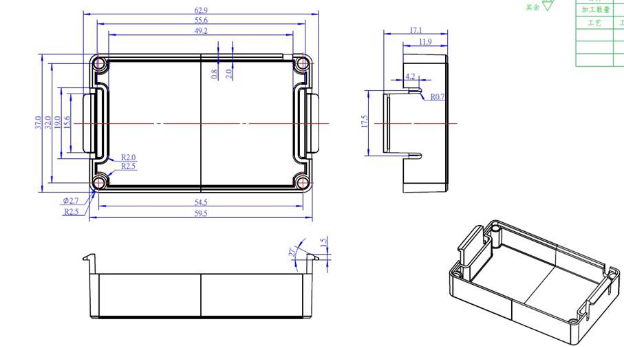
42. kích cỡ của pin trên mbot
Kích thước cho nắp pin :
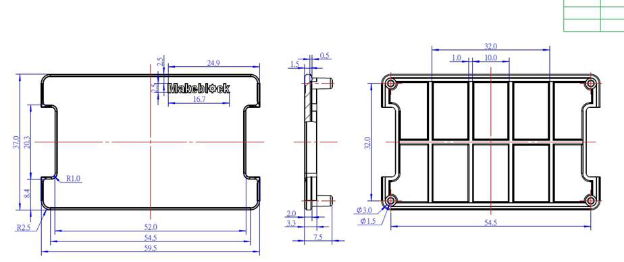
Kích thước cho ngắn chứa pin:
43.Có gì khuyến cáo về pin li-po sử dụng cho mBot
Điện áp làm việc của mCore là 3.7V tới 6V.
Pin Li-ion có thể sạc 3.7V là phù hợp cho mBot.
Có thể sử dụng pin litium sạc lại được hoặc cũng có thể sử dụng pin sử dụng 1 lần như pin con thỏ.
IX, program example
44.Chương trình kiểm tra cảm biến hồng ngoại và cảm biến dò đường
Chương trình trên đã được thử nghiệm và hoạt động chính xác.
Tải chương trình cho mBot, bạn có thể kiểm tra dựa theo tính logic
1.Giữ cả hai cảm biến 1 và 2 không chạm bất kỳ thứ gì và nhấn phím A ( value = 0), nó sẽ tiến về phía trước.
2. Tiếp tục chạm vào cảm biến 1 bằng ngón tay của bạn (có đèn led màu xanh bên cạnh cảm biến 1), và nhấn phím A trước khi bạn thả tay ra, ( value = 1), nó sẽ rẽ trái.
3. Tiếp tục chạm vào cảm biến 2 bằng ngón tay của bạn (có đèn led màu xanh bên cạnh cảm biến 2), và nhấn phím A trước khi bạn thả tay ra.( value =2 ), nó sẽ rẽ phải.
4. Tiếp tục chạm cả cảm biến 1 2 bằng ngón tay của bạn (có hai đèn led màu xanh bên cạnh cảm biến 1 và 2và nhấn phím A trước khi bạn thả tay ra( value = 3), nó sẽ chạy lùi lại.
Bạn có thể tham khảo chương trình dưới đây :
https://drive.google.com/open?id=1CQDkiQPUwugPu7diFvT2-PrWlYZ5bD0k
45.Chương trình kiểm tra 1m LED( 30 light) hoạt động trên mBot
Ở đây có thể kiểm tra nếu tất cả 30 đèn trên dải led của mBot hoạt động bình thường. Tải lên chương trình dưới đây và kiểm tra mBot của bạn với dải led:
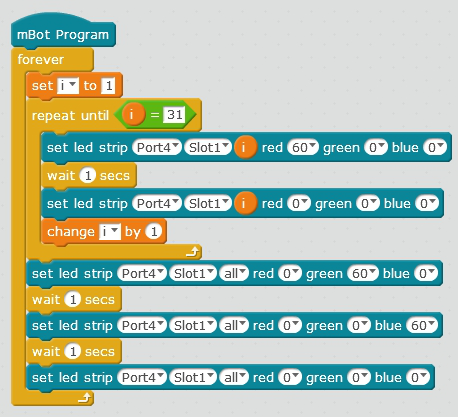
Với chương trình trên, đèn LED sẽ bật màu đỏ lần lượt từ 1 đến 30, sau đó tất cả 30 đèn LED đều bật màu xanh lục, sau đó tất cả 30 đèn LED đều bật màu xanh lam. Và tiếp theo là lặp lại.
Nếu có một số đèn bị tắt, bạn có thể cần kiểm tra pin cho mBot, vui lòng thay pin thử.
Nếu có vấn đề tương tự. Xin thử thay đổi pin cho robot.
Có thể sử dụng pin litium sạc lại được hoặc cũng có thể sử dụng pin sử dụng 1 lần như pin con thỏ.
Lưu ý: Đây là dải led mở rộng gắn kèo với mBot, bạn có thể không thực hiện được chương trình nếu không gắn thêm dải led mở rộng









")


